The Argentine's FONCyT support this project.
The project aims at studying the pedestrians behavior on street corners
and the interaction between vehicles and people.
Video Analytics estimates pedestrians behavioral models from a set of sequences captured at a street corner of the City of Buenos Aires.
An example of a fully labeled set for detection and tracking of people can be found here.
The following video shows an example result of pedestrian detection and tracking algorithm on the GS54 dataset.
More details are given in the following publications:
Detecting pedestrians on a Movement Feature Space, and Pooling pedestrian tracking information for a high-level scene analysis
PID 2005 - SECYT Argentine
The Argentine's SECyT and the City of Tandil support
this project developed in the UNICEN University.
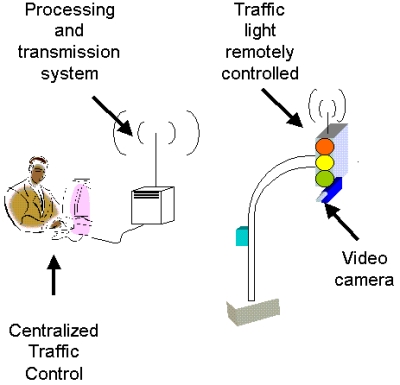
The project will consist in the development and implementation
of a Control Traffic System to optimize the vehicular flow and
increase security.
My contribution involves the automatic measurement of traffic
variables by image processing.
Image processing enables wide range of mesurements :
queue lengths
occupancy rate
spatial occupancy
number of stopped vehicles
vehicles flow and speed
abnormal or dangerous situations
pedestrian detection
The following picture shows an exemple of the queue length estimation from a video sequence.
The object detection is based on a Mouvement Feature Space, and an example code is available here.
Project Peugeot-Citroen SA
This project, done in collaboration with PSA France,
dealt with the detection of obstacles.
It addressed the vehicle detection problem through an
on-board monocular vision system.
The detector used a cascade of boosted classifiers, inspired in
Viola and Jones' works.
Two features were evaluated: Haar filters and Histograms of Oriented Gradient.
The former are associated to discriminative classifiers,
while the latter to generative classifiers.
A new detector was obtained from their fusion, improving the results and the
performance of the cascade architecture.
In addition, we proposed a classification of detected vehicles in three classes:
passenger cars, vans and trucks.
More details are given in the EURASIP journal publication :
A cascade of boosted generative and discriminative classifiers
for vehicle detection
Project LPREditor
The goal of this project was the development of an algorithm for the object
recognition.
It was done in partnership with
LPREditor, an enterprise from
Montpellier, France.
Our application works assiting an automatic license plate recognition
system already developed by LPREditor.
This last was designed to be used in the access control of vehicles
to restricted areas or parking lots.
Our algorithm enables the system to recognize not only the license plate
but the brand and model of a vehicle presented at the check in/check out
points.
The multiclass classification method uses an Oriented-Contour point based
model that provides additional information to the simple contour points.
We exploit the rigidity in the designing patterns entailed by the
manufacturers.
The final classification surges as a combination of different voting
algorithms.
In the figure, we can see the way the model is created from a
Training Bases sample.
For more details see the ICPR2006 conference article.
Tracking Human Grasping Gestures
This work deals with a monocular vision system for detect and track
grip graping gesture.
This system could be used for medical
diagnostic, robot or game control. We describe a new algorithm,
the Chinese Transform, for the segmentation and localization of
the fingers.
The Chinese Transformation, inspired in the Hough Transform, is a voting method
utilizing the position and the orientation of the gradient from
the image edge's pixels.
Two points having opposite
gradient directions vote for their mid-point.
In the example below,
we found the oriented edges for the rectangle (different gradient orientations
have different colors). Iteratively, the algorithm votes for the mid-point of
all the pairs of opposite gradient orientation.
The acumulator matrix define a center region of the rectangle.
This algorithm is applied to detecting fingers:
We take advantage of the form of the index
finger and thumb (the two fingers forming the grip). Their
parallel edges satisfy the distance and gradient direction
conditions. The accumulation zones founded in the votes array can
define the fingers regions.
We applied a Kalman filter to track the grip gesture
in a sequence.
I made the Master practice in the Institut National de Recherche en Informatique
et en Automatique (INRIA) Rocquencourt, Versailles, France, for the
IMARA project (Informatique, Mathématique et Automatique pour la
Route Automatisée).
The objetif was the vehicle detection in video sequences.
I studied simple objects recognition algorithmes in order to detect a particular
vehicle, the CyCabs.
The application involved a Vehicle Platooning configuration :
an autonomous CyCab (a robotic platform) equipated of an on-board vision system,
follows another CyCab drived by an operator.
An edge detector was used to obtain a bounding box of
the potential CyCab.